Najważniejsze
- •Miniaturowy robot MIR z Uniwersytetu w Bazylei ma automatycznie przygotowywać zęby pod korony i ograniczać liczbę wizyt stomatologicznych.
- •Urządzenie ma rozmiar korka od wina, a jego napęd i sterowanie znajdują się poza jamą ustną; ruch przekazywany jest przez elastyczne elementy.
- •W testach na modelach z żywicy i ceramice robot uzyskał błąd pozycjonowania poniżej 0,2 mm oraz siłę wiercenia nieprzekraczającą 5 N.
- •W przyszłości twórcy chcą dodać czujniki i kamerę, aby robot mógł sam monitorować położenie i postęp zabiegu.
- •Cyfrowy skan ma służyć nie tylko do planowania opracowania zęba, ale też do szybszego zamawiania korony już po pierwszej wizycie.
Naukowcy z Uniwersytetu w Bazylei pokazali miniaturowego robota MIR, który automatycznie przygotowuje ząb do korony i może ograniczyć liczbę wizyt u dentysty.
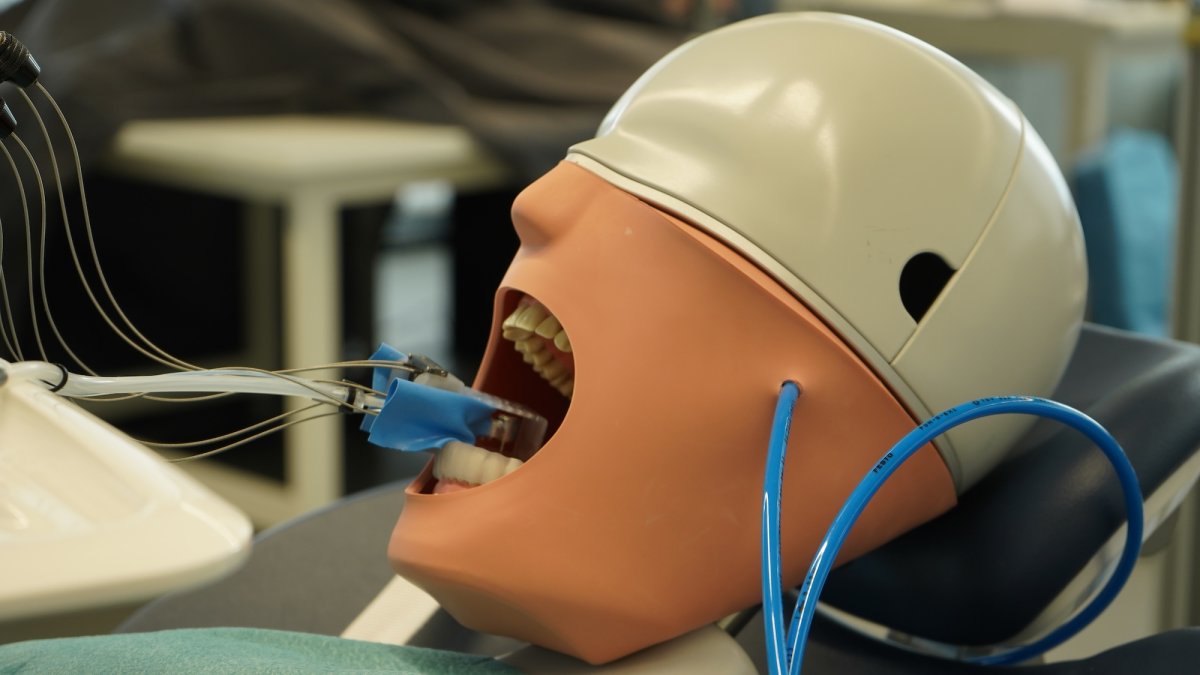
Naukowcy z Uniwersytetu w Bazylei opracowali miniaturowego robota stomatologicznego MIR, który może automatycznie przygotowywać zęby do koron. Badania opisano 23 czerwca 2026 roku w czasopiśmie IEEE Transactions on Medical Robotics and Bionics. Twórcy podają, że rozwiązanie ma skrócić leczenie i zmniejszyć liczbę wizyt potrzebnych do wykonania korony.
MIR, czyli Miniature Intraoral Robot, ma rozmiar zbliżony do korka od wina i mierzy 43 na 26 na 28 milimetrów. Jego silniki i układ sterowania znajdują się poza jamą ustną, a ruch przekazywany jest przez elastyczne wały, przewody i tuby. Robot mocuje się do indywidualnie dopasowanej szyny stomatologicznej, wykonanej na podstawie cyfrowego skanu zębów pacjenta. Dzięki temu urządzenie ma utrzymywać pozycję nawet wtedy, gdy pacjent poruszy głową.
Zespół badawczy testował robota na modelach zębów z żywicy syntetycznej oraz na materiale ceramicznym o twardości zbliżonej do szkliwa. Opracowanie zęba odbywa się w dwóch etapach: najpierw szeroki wiertnik usuwa materiał z góry, a potem dłuższe i węższe narzędzie pracuje po bokach. W testach robot osiągnął błąd pozycji poniżej 0,2 mm, mimo że nie miał jeszcze czujników do bezpośredniego pomiaru i korekty położenia. Siła generowana podczas wiercenia nie przekraczała 5 niutonów, czyli mniej więcej ciężaru półlitrowej butelki wody.
Według badaczy cyfrowy skan ma w przyszłości posłużyć nie tylko do zaplanowania opracowania zęba, ale też do zamówienia korony już podczas pierwszej wizyty. To ma ograniczyć konieczność powrotu pacjenta na kolejne etapy leczenia, które dziś zwykle obejmują kilka spotkań: opracowanie zęba, pobranie wycisku, wykonanie korony i jej ostateczne osadzenie. Zespół podaje też, że sprawdza poziom hałasu urządzenia, aby ocenić jego przydatność w praktyce klinicznej.
Prace nad MIR prowadzono we współpracy z Centrum Stomatologii Uniwersytetu w Zurychu, bazylejską firmą Camlog Biotechnologies GmbH oraz Uniwersytetem w Bernie. Projekt powstał w ramach finansowania Innosuisse. W kolejnych etapach badacze chcą dodać do robota czujniki i kamerę, aby urządzenie mogło monitorować swoje położenie i postęp zabiegu bez zwiększania rozmiaru konstrukcji.
Jak działa robot MIR w leczeniu pod korony
Na podstawie opisu prototypu MIR z Uniwersytetu w Bazylei.
Najważniejsze dane techniczne robota MIR
| Parametr | Wartość | Znaczenie |
|---|---|---|
| Wymiary robota | 43 × 26 × 28 mm | Rozmiar zbliżony do korka od wina |
| Błąd pozycjonowania | < 0,2 mm | Wysoka precyzja mimo braku czujników |
| Siła wiercenia | < 5 N | Niewielkie obciążenie podczas opracowania zęba |
| Materiał testowy | żywica syntetyczna i ceramika | Sprawdzenie działania w warunkach zbliżonych do klinicznych |
| Liczba etapów opracowania | 2 | Najpierw szerokie wiercenie od góry, potem węższe po bokach |
Na podstawie tekstu artykułu i informacji z Uniwersytetu w Bazylei.
Słownik pojęć
- Miniature Intraoral Robot (MIR)
- Miniaturowy robot stomatologiczny przeznaczony do pracy wewnątrz jamy ustnej, którego celem jest automatyczne opracowanie zęba pod koronę.
- Korona protetyczna
- Uzupełnienie stomatologiczne osadzane na osłabionym lub zniszczonym zębie w celu przywrócenia jego funkcji i kształtu.
- Cyfrowy skan
- Trójwymiarowy obraz zębów i jamy ustnej, wykorzystywany do planowania leczenia oraz projektowania indywidualnych elementów, takich jak szyna czy korona.
- Szyna stomatologiczna
- Indywidualnie dopasowana nakładka stabilizująca pozycję robota i pomagająca utrzymać jego ustawienie podczas zabiegu.
- Błąd pozycjonowania
- Różnica między zaplanowanym a rzeczywistym położeniem narzędzia lub urządzenia; im mniejsza, tym większa precyzja.
- Czujniki i kamera
- Elementy, które w kolejnej wersji robota mają umożliwić monitorowanie położenia oraz postępu zabiegu w czasie rzeczywistym.
- Innosuisse
- Szwajcarska agencja wspierająca innowacje, która finansowała projekt opisany w artykule.
